泛家居、汽車、3C智能製造全產業(yè)生態圈服務商
— 衝壓機械手 | 機器人與(yǔ)自動化 | 五金模具 | 塑(sù)膠(jiāo)模具 | 新能源 —

泛家居、汽車、3C智能製造全產業(yè)生態圈服務商
— 衝壓機械手 | 機器人與(yǔ)自動化 | 五金模具 | 塑(sù)膠(jiāo)模具 | 新能源 —
137 9403 5366
0757-22390755

谘詢熱線
0757-2239 0755作者: 瀏覽:70808 來源: 時間:2019-10-26
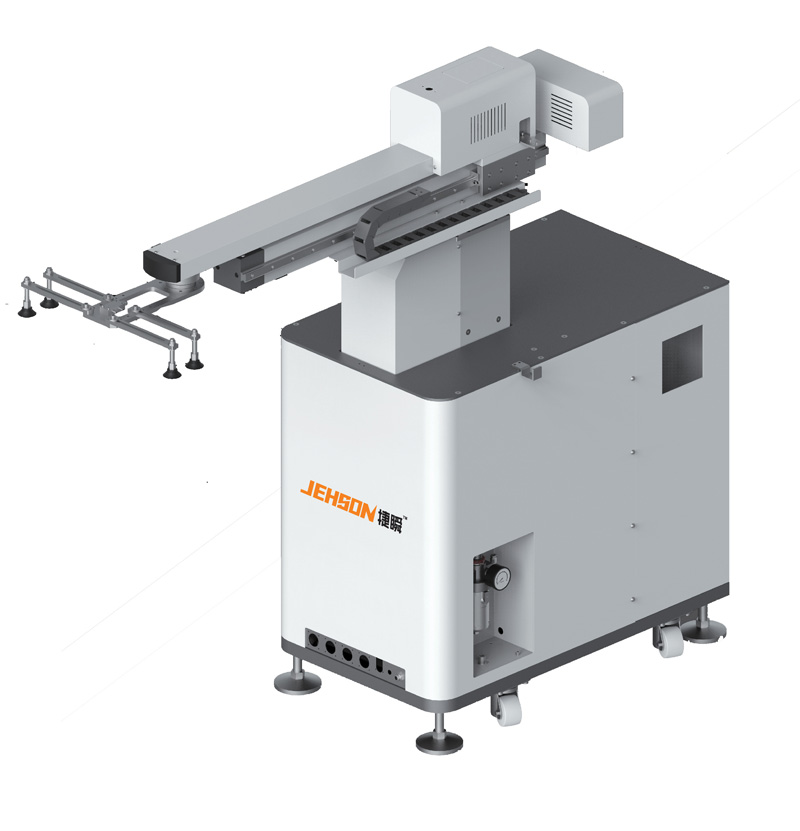
衝壓機(jī)械手生產(chǎn)原理及其分類:
普通手動壓力機在機械裝置的(de)工業生(shēng)產水平/垂直位移常用,它(tā)移(yí)動由氣缸,反過來缸通過相應的電磁閥控製驅動。衝壓機器人在衝壓領域的應(yīng)用,正(zhèng)顯露出越來(lái)越大(dà)的優點。衝(chōng)壓機器人正在被廣泛(fàn)的應用到衝(chōng)壓領域,隨著衝壓機器(qì)人(rén)技術的不斷發展和日臻完善,它必將給衝壓領域帶來一次巨大的變革。工作時間長。24小時都可以連續運作,而人工必須要有休息時間。衝壓(yā)機器人成本低,半年能回本。一台機械手大(dà)概在6-10萬,軸數不一樣,品牌不一樣都會影響(xiǎng)價格。成本前期來說會是一筆不小的錢,可是按時間,月份來算的(de)話也就相當於員工大半年的(de)工資。而且運作效率(lǜ)非常之高,比(bǐ)起人工的出錯率要低很多。
氣動機械手主要由框架、機械臂和氣爪三部分組成。驅動肩關節的運(yùn)動由兩塊氣動肌肉(ròu)、四塊氣動肌肉、四(sì)塊氣動肌肉和四塊氣動肌(jī)肉組成。
衝壓機械手的分類:
首先,根據驅(qū)動方式可(kě)分為液壓、氣動、電動、機械手;
二、按適用範圍可分為專用(yòng)機械手和通用機械手兩種;
三。根據軌跡控製的方式,可分為點控製(zhì)和連續軌(guǐ)跡控製機械手。
氣動(dòng)衝壓(yā)機械(xiè)手可實現四個自由度的運動,其(qí)各自自(zì)由度的驅動均由氣動肌肉實(shí)現。前端氣爪抓取物體,通過氣動(dòng)肌肉驅動實現各關節的轉動,根據合理的控(kòng)製(zhì),使物體在空間內(nèi)移動,最終實現機(jī)械手運動請求。

佛山市順德區91成人抖音精密模具自動化科技有(yǒu)限公司
廣(guǎng)東捷瞬機器人有限公司
廣東鑫碩精密科技有限公司
蕪湖凱(kǎi)碩智能科技有限公司
總部(廣東佛山)地址:
佛山市(shì)順德區北滘鎮西海村烈士北(běi)路8號
137 9403 5366
安徽蕪湖公司:
安徽自由貿(mào)易試驗區蕪湖片區鳩江經(jīng)濟(jì)開發區靈鳶路(lù)9號
服務谘詢熱線:
137 9403 5366
0757-22390755
————


